

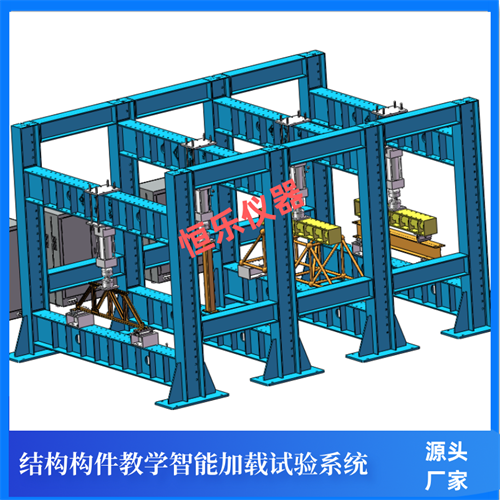
結(jié)構(gòu)構(gòu)件教學(xué)實(shí)驗(yàn)智能加載儀,該教學(xué)試驗(yàn)系統(tǒng)主要用于本科教學(xué)中的混凝土梁、混凝土柱、鋼結(jié)構(gòu)柱、鋼桁架、螺栓球桁架、空間網(wǎng)架的靜力加載試驗(yàn)。

結(jié)構(gòu)構(gòu)件教學(xué)實(shí)驗(yàn)智能加載儀
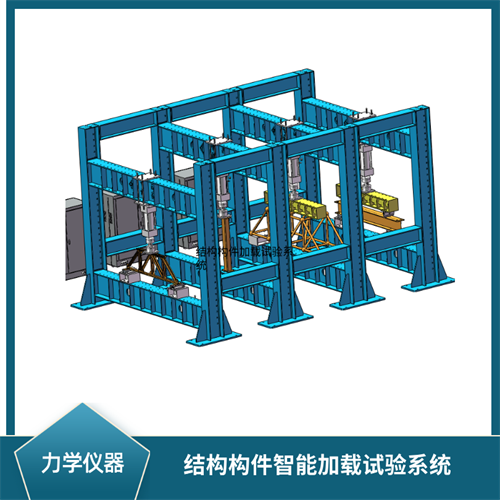
結(jié)構(gòu)構(gòu)件教學(xué)實(shí)驗(yàn)智能加載儀,該教學(xué)試驗(yàn)系統(tǒng)主要用于本科教學(xué)中的混凝土梁、混凝土柱、鋼結(jié)構(gòu)柱、鋼桁架、螺栓球桁架、空間網(wǎng)架的靜力加載試驗(yàn)。設(shè)備既可以作為一套綜合系統(tǒng)使用,也可以拆分成4套獨(dú)立的單榀反力架使用。
一、自平衡主機(jī)框架
(1)采用自平衡反力系統(tǒng),設(shè)備總高度3.0 m,每榀框架的立柱內(nèi)部?jī)糸g距2.5m,兩榀之間的間距2m;加載橫梁與基座設(shè)計(jì)承載力300kN,總承載力1200kN;連接為一臺(tái)整機(jī)后,最外側(cè)立柱軸心6.8m×2.7m。
(2)鋼立柱,加載橫梁,底梁,連接梁;配短柱承臺(tái),承臺(tái)高度150mm;配鋼桁架,跨度1400mm;配固定端鉸支座,滑動(dòng)端鉸支座;固定端鉸支座受壓承載力300kN,雙向旋轉(zhuǎn)角度±15°;滑動(dòng)端鉸支座受壓承載力300kN,滑動(dòng)行程±40mm;位移傳感器,徑向量程±50mm。
(3)具有智能控制功能。包括:三維位移;Z值距離;徑向距離、徑向距離差;徑向角、徑向角差;應(yīng)變X、應(yīng)變Y和應(yīng)變XY;主應(yīng)變;主應(yīng)變;等效應(yīng)變;剪切角;運(yùn)動(dòng)機(jī)構(gòu)軸向位移90mm,伸展120°,外旋±10°,前移±15mm,外移±5mm,外翻±5°。
二、高精度伺服作動(dòng)器
(1)高精度伺服作動(dòng)器,工作壓力21MPa,行程200mm;載荷:300kN;頻率范圍:0~50Hz;作動(dòng)器尾部法蘭連接,活塞桿端配拉壓力萬(wàn)向加載球鉸,拉壓力無(wú)間隙;幅頻特性:頻率5Hz時(shí)位移振幅2mm;安裝高精度位移傳感器,精度0.001mm。
(2)示值誤差,4%~100% F.S.范圍內(nèi),示值的±1%;支持通過(guò)標(biāo)稱幾何體特征進(jìn)行映射擬合,在掃描模型上創(chuàng)建出對(duì)應(yīng)的幾何體,便于尺寸偏差和形位公差的快速檢測(cè);灰度值檢測(cè)功能:系統(tǒng)支持通過(guò)拍攝的多視角圖片進(jìn)行邊緣特征重建,用于尺寸偏差的精準(zhǔn)檢測(cè);軟件支持小組件刪除、網(wǎng)格修復(fù)、釘狀物去除讓網(wǎng)格優(yōu)化功能,無(wú)需借助第三方處理;輸出同步跟蹤同步信號(hào)。
三、電液伺服油源
全封閉電液伺服系統(tǒng)動(dòng)力,每組可獨(dú)立使用,可合并使用,系統(tǒng)壓力28MPa;距離1m位置噪音65db(A)。
四、控制軟件
可根據(jù)客戶要求設(shè)置位移加載或荷載加載,可設(shè)置加載速度。軟件維護(hù)升級(jí)。
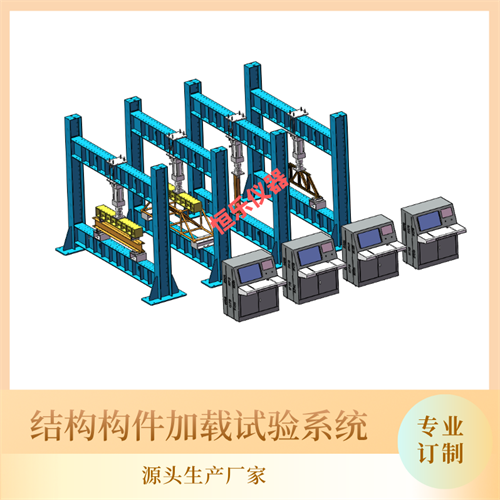
五、多功能控制系統(tǒng)
(1)控制系統(tǒng)為力、位移全數(shù)字式閉環(huán)系統(tǒng);加載波形:正弦波、三角波、梯形波、方波、載荷譜、隨機(jī)波及其組合波形;系統(tǒng)可實(shí)現(xiàn)4個(gè)控制通道作動(dòng)器的協(xié)調(diào)加載。在1Hz–200Hz之間可選擇的頻率有 8個(gè)級(jí)別;
(2)箱式控制器數(shù)量。
六、帶有虛擬仿真系統(tǒng)。
設(shè)置超筋梁、適筋梁、少筋梁,并展現(xiàn)出不同的破壞效果;可設(shè)置截面(形狀、尺寸)、配筋率(縱筋、筋)、鋼筋直徑、鋼筋牌號(hào)、混凝土強(qiáng)度等參數(shù);
相關(guān)產(chǎn)品

網(wǎng)站首頁(yè) 公司簡(jiǎn)介 產(chǎn)品中心 新聞資訊 技術(shù)文章 資料下載 在線商店 聯(lián)系我們
濟(jì)南恒樂(lè)興科儀器有限公司版權(quán)所有
技術(shù)支持:塑料機(jī)械網(wǎng) 管理登陸 GoogleSitemap

 打印當(dāng)前頁(yè)
打印當(dāng)前頁(yè) 發(fā)郵件給我們:tianshiyanji@163.com
發(fā)郵件給我們:tianshiyanji@163.com